Shunkei VTXを搭載したShunCarを用いた,インターネットを介した沖縄ー東京間(約1600km)の映像伝送と遠隔操縦の実験を行いました.ラジコン→操縦者のGlass-to-Glass映像遅延は61.4msで,人間→ラジコンの操縦遅延はおおよそ約50ms程度です.

実際に操縦している様子
定性評価は行なっておりませんが,1600km離れた場所のラジコンカーを操作しているとは思えないほど低遅延に操縦することができました.スピードを出した際に車が横滑りしてもカウンターステアリングを素早く当てる,意図的にドリフトさせるなど低遅延ならではの操縦を楽しむことができました.
ネットワーク環境
東京側にShunCar(車側),沖縄側に操縦側を設置しています.
大学ネットワークであるSINETを利用しました.パケットのルーティング制御は特に行なっていませんが,経路を確認したところ6Hop程度であり通常のインターネット通信よりもジッタが少ない通信ができる環境になります.
距離は直線距離でおおよそ1600kmほどあります.石英ガラス製の光ファイバー中の伝送速度は真空中のおおよそ2/3になることから理論値では約8msとなり,実際にはルータやスイッチのキュー待ちやバッファリングにより遅延がさらに増加します.
今回の環境ではRTTは40.5ms, ジッタは約4msでした.インターネットやモバイルネットワークでは経路が異なる場合があることや,無線区間でのタイムスロット割り当ての違いなどから正確な評価とはいえません.本実験では片道ネットワーク遅延はRTTを半分にすることで算出していますが,今後正確な測定を行なってまいります.

測定結果
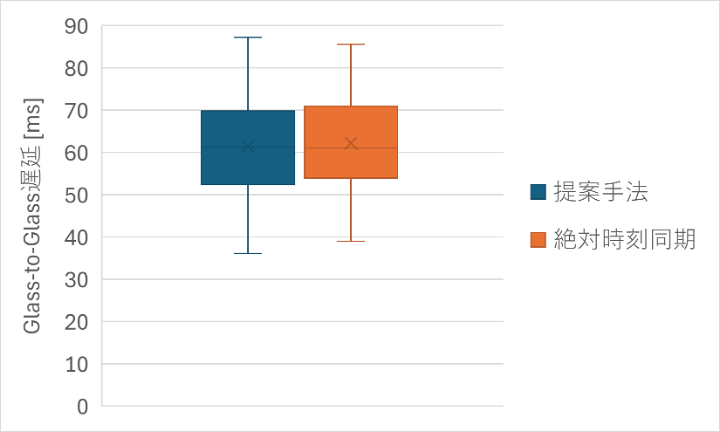
1方向のGlass-to-Glass映像遅延(カメラに光が入ってからディスプレイから光として出てくるまでのネットワーク遅延を含めた合計遅延)を測定できる装置を開発しました.この遅延は人間が実際に操作時に感じる遅延であり最も厳しい遅延となります.
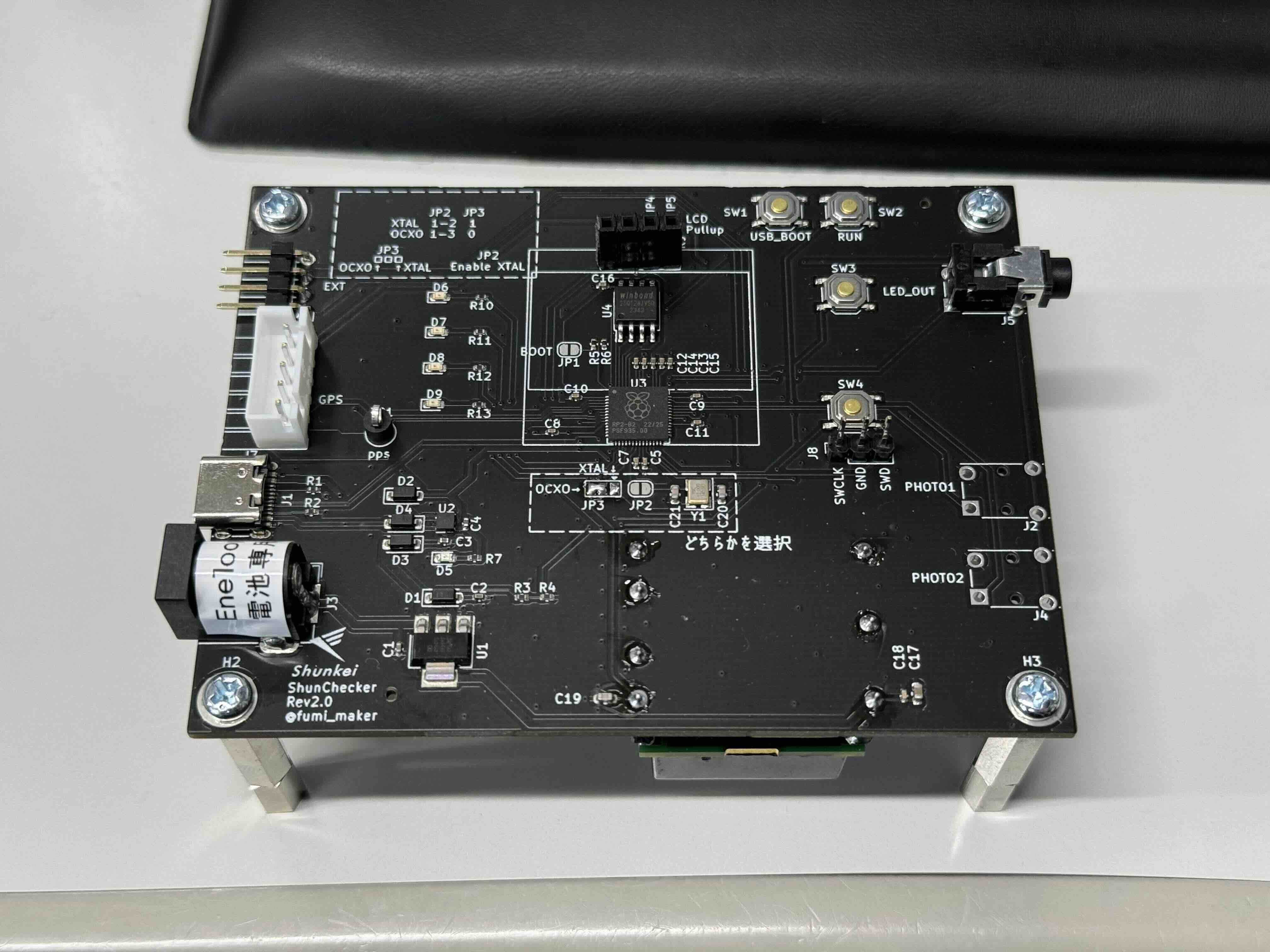
測定前にはGNSSを用いた時刻同期を実施したシステムと比較し,測定誤差が100us以下であることを確認しています.
本装置を用いて100回の測定を行ったところ,本環境の実測値の平均は61.4msであり,うち20.5msが片道ネットワーク遅延でした.
操縦側の遅延についても測定する必要があります.今回は簡易的にカメラで高速度撮影を行い4.1msの分解能で測定しました.
ハンドルを動かしてからIPに取り込まれIP伝送され,ラジコン側でIP受信,デコード,モータなどの信号までの遅延は約50ms程度で,うち20.5msは片道ネットワーク遅延となります.正確にはGlass-to-Glass遅延のようにStick-to-Motion遅延を測定する必要があります.
さらに低遅延にするには
ラジコン側のサーボモーターをコアレスモーターに,モーターやESCをブラシレスモーターにすることでより応答性をあげ,アクチュエータの遅延を削減することができると考えられます.
終わりに
Shunkeiでは低遅延な遠隔操縦のため,人間→操縦→移動体→映像伝送→人間のフィードバックループを低遅延化することについて取り組んでいます.低遅延IP映像伝送や操縦,遅延測定手法.ネットワーク設計といった研究開発を行なっています.ご興味ございましたら info@shunkei.jp までご連絡ください.